
This post is meant to clarify how the Roomba 500 series Virtual Wall Lighthouse (lighthouses) works.
There are 6 main components in this post:
1. Robot / Lighthouse pairing
2. Differences between Lighthouse mode and Virtual Wall mode
3. Lighthouse traversing
4. Docking / robot behavior when lighthouses are used
5. Differences between Virtual Wall Lighthouses and Virtual Walls
6. Placement and usage tips for lighthouses and virtual walls
Robot / Lighthouse pairing
When you replace the batteries in a lighthouse, it loses its memory of what robot it is paired with. Also, if you reset the robot or remove its battery the robot loses its memory of what lighthouses it was paired with.
When a lighthouse is not paired and it senses the signal of any Roomba, the lighthouse wakes up and waits to be discovered.
When the robot starts a mission, it sends a message to all previously paired or unpaired lighthouses and waits for the lighthouses to respond and keeps track of how many of them respond so it knows how many it should expect to encounter during its mission. It keeps checking for lighthouses throughout the mission.
When a robot encounters a lighthouse that it detects with its infrared (IR) sensors, the robot will "ping" the lighthouses via radio frequency (RF) and it looks for a response via IR. (If you have ever seen a robot pause in front of a lighthouse, this is what it is doing.) Once the robot can associate an RF signal with a particular lighthouse the robot will enumerate that lighthouse and this is how the robot starts to build a “guidebook” of what room it is in and how many rooms it will have to clean and how many lighthouses it will have to pass in order to make it back to the dock. The robot repeats this procedure for every LH that it meets (even if the lighthouse is in virtual wall mode). Once the robot has made this association the lighthouses and the robot are paired and the lighthouses will not turn on for any other robot until the lighthouse's batteries are removed and replaced.
The room enumeration process starts from scratch at the beginning of each new mission. So if you need to change the location of a lighthouse and you do it while the robot is off, the robot will adapt to this change automatically. (Please note that if you move a lighthouse *during* a mission, the robot will not adapt to the change, and your robot might get stuck in a room or be unable to find its dock.)
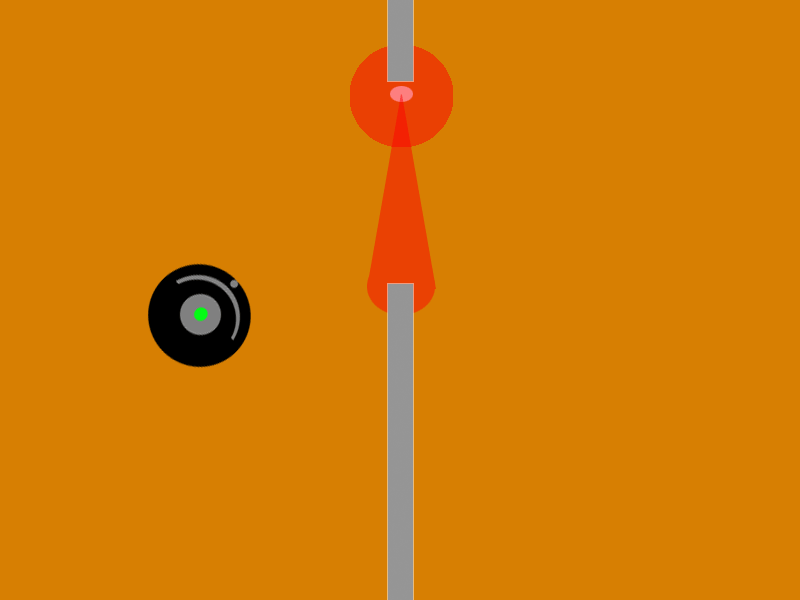
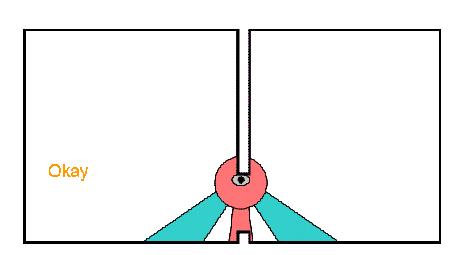
The image below shows what happens during the paring process. The purple circles represent the RF communications between the robot and the lighthouse and the red area represents the halo and fence beams, which are infrared light.
Differences between Lighthouse mode and Virtual Wall mode
In lighthouse mode, the lighthouse acts like a virtual door, which opens when the robot asks it to. Most of the time the lighthouse has its halo and fence beam turned on, which prevents the robot from going past the lighthouse. Once the robot has finished cleaning the current room, it “asks the lighthouse to open the door” and the robot traverses the lighthouse. Traversing is explained in detail below.
In virtual wall mode, the lighthouse turns on automatically, but the robot will never cross the fence beam (the invisible barrier).
Lighthouse traversing
When the robot decides that it is time to move from one room to the next, it performs an act that we call traversing, which simply means that the robot uses a lighthouse to go from one room into another.
There are 5 steps in the traversing process:
1. The robot decides that it is finished cleaning the current room.
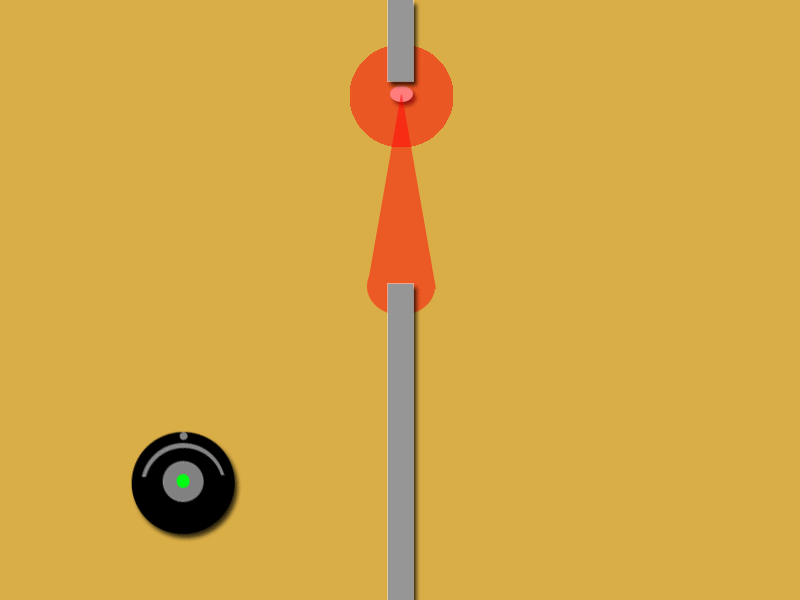
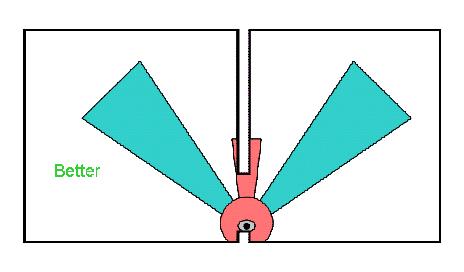
2. The robot asks the lighthouse to turn on its infrared (IR) “tractor beams” (shown in green and blue below) using radio frequency (RF) communication (represented by the purple circles below).
3. The robot continues to clean until it locates the tractor beam and then follows the tractor beam until it reaches the lighthouse’s halo (shown in red below).
4. The robot follows the lighthouse’s halo until it reaches the tractor beam (shown in blue below) on the other side of the fence beam (shown in red below), in the other room.
5. The robot uses RF to tell the lighthouse to turn off the tractor beams to save battery power in the lighthouses.
This process is repeated for each lighthouse that the robot finds during its mission. When the robot has finished its mission it will reverse-traverse, or traverse in the opposite direction, each of the lighthouses using the same method described above.
Please see “Placement and usage tips for lighthouses and virtual walls” at the bottom of this post.
Docking / robot behavior when lighthouses are used
When lighthouses are in use the robot will ignore signals from any and all home bases (docks) unless the robot thinks that it (the robot) is in the same room where the dock is located. The robot decides what room it (the robot) is in based on how many lighthouses it has traversed. This is best explained by example:
Room 1 is where the dock is.
Room 2 is between lighthouse 1 and lighthouse 2.
Room 3 is after lighthouse 2.
If the robot traverses lighthouse 1 and is in room 2 and you manually carry the robot back into room 1 to clean it and then set it down in front of the dock, the robot will think that it is still in room 2 and it will ignore the dock because it thinks that it has to find lighthouse 1 and traverse it before it is able to dock.
The same is true if the robot is in room 3. The robot thinks that it has to go past 2 lighthouses before it can successfully dock.
When the robot is taken from room 2 or room 3, you must manually, physically return the robot (carry it) to the room that you took it from if you want to use the dock button.
If you do not want to carry the robot back to the room that you took it from then you must manually place the robot on the dock. If you place the robot on the dock manually then the mission is canceled and the robot will start charging. When the robot starts its next mission, the room counter is reset and it will work normally.
In general if you manually move the robot (i.e. carry it) from one room to another the robot will be confused by its apparent ability to teleport from room to room
It is not immediately intuitive to most people why the robot would ignore its dock when it can see it, but here is one case that highlights a problem, which this behavior is designed to solve:
Let’s assume that the robot is able to see the docking beams of the home base, but there is a virtual wall or other impassible obstacle between the robot and the home base. If the robot attempts to follow the docking beams it will follow them until it reaches the impassible object and then abort its approach and try again, thinking it has found the home base. The robot could end up getting stuck or at least significantly delayed by trying over and over to follow those docking beams, only to get part-way there and encounter the impassible object. On the other hand, if the robot ignores signals from the home base, until it knows that it is in a room where the home base has been previously, successfully acquired then the robot knows that it can follow the docking beams to a successful docking event.
We constantly strive to improve our robots and make them smart, adaptive and robust so they can operate in a completely random world with an infinite number and variety of room configurations and accessory placements. This behavior is one that is designed to make docking reliable in as many environments as possible.
Differences between Virtual Wall Lighthouses and Virtual Walls
The 500 Series Virtual Wall is (from the user perspective) the same as the virtual walls that came with the 4xxx series robots and Scooba. You have to turn them on manually, and they turn off automatically. FYI The difference between the 5xx series VW and the 4xxx series VW is some complicated stuff related to the way the VW communicates to the robot via infrared (IR).
The Virtual Wall Lighthouse is (from the user perspective) quite different from the VW. The robot communicates with the Lighthouse (LH) via radio frequency (RF) and via infrared (IR) and the robot turns on the LH automatically when the robot starts a mission. It is worth noting that when using the lighthouse, you can cause the robot to do different things in response to the lighthouse, based on whether you have the lighthouse in "virtual wall mode" or "lighthouse mode". In lighthouse mode, the lighthouse acts like a virtual door, which opens when the robot asks it to. In virtual wall mode, the lighthouse turns on automatically, but the robot will never cross the fence beam (the invisible barrier).
Placement and usage tips for lighthouses and virtual walls
Virtual Wall Mode:
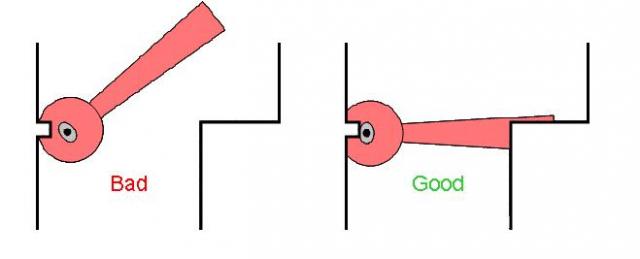
Place in passageways where Roomba is not to cross.
Orient with the back to a wall or door frame such that the invisible fence beam is blocking the passageway thoroughly.
Lighthouse Mode:
Orient with the back of the lighthouse to a wall or door frame such that the invisible fence beam is blocking the passageway thoroughly.
Make sure that there are no obstructions within 1 meter (3 feet) of the front side of the lighthouse.
Make sure that there are no obstructions to the sides of the lighthouse. The robot must be able to find and follow the tractor beams and also find and follow the halo.
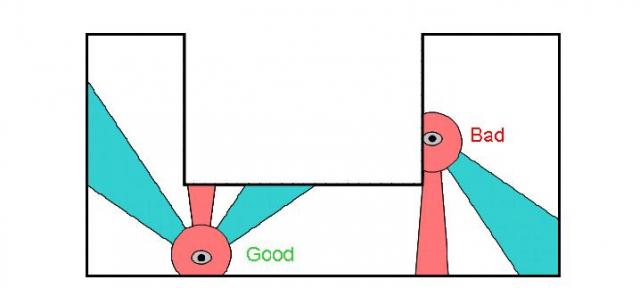
If possible, orient the lighthouse so that the tractor beams point into open spaces.
Original post can be seen Here @ iRobot Forums.

